Artelys Kalis 12.8: Solve your biggest Job shop problems!
Main new features
This new version makes it easier to solve job-shop problems (JSP). Artelys Kalis improves the modeling and resolution of optimization problems in IT and operations research where jobs have to be scheduled and assigned to resources .
On the modelling side, the user is now able to define a set-up time between two tasks requiring the same resource. For example, it is now easy to model a scheduling problem where the maintenance tasks are to be performed in different places meaning the skilled technicians required for these tasks must travel between these places.
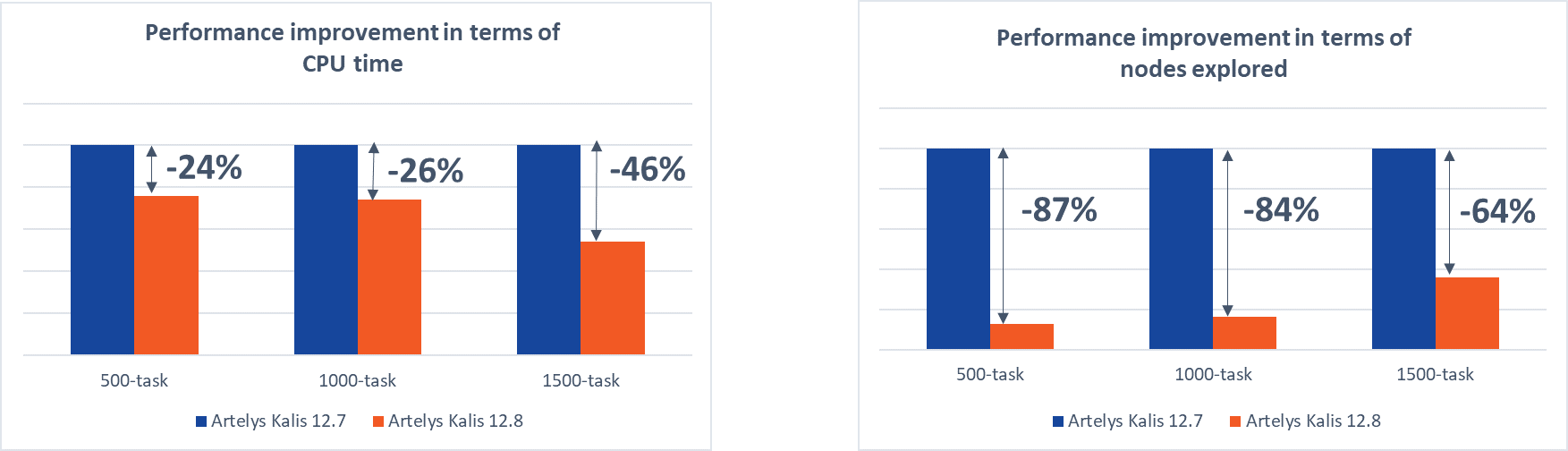
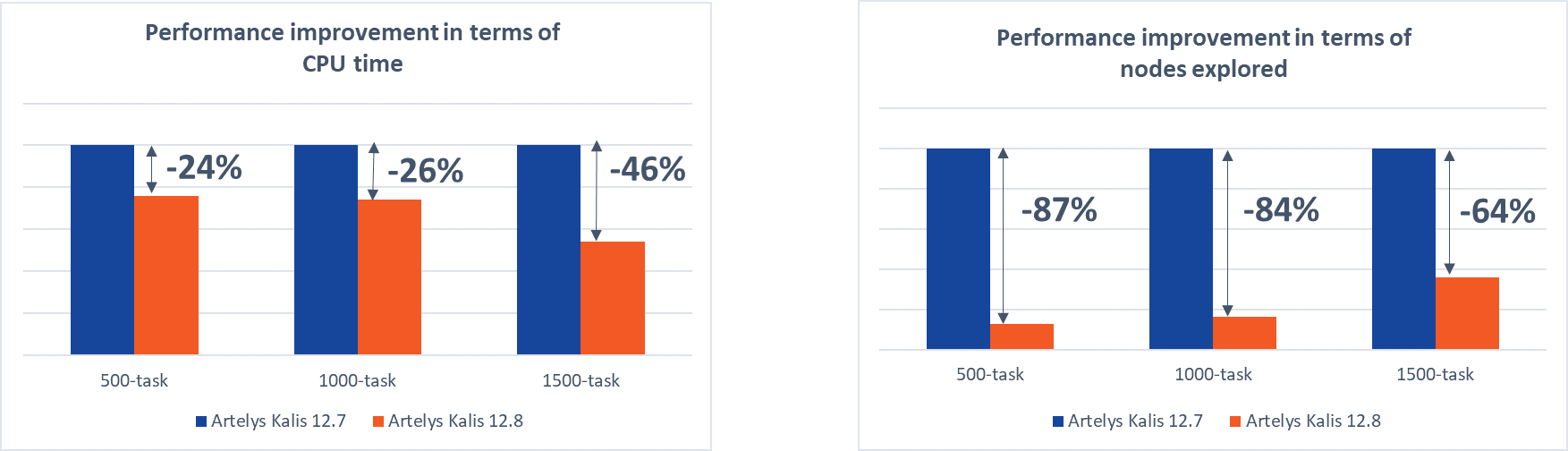
On the resolution side, the Timetable algorithm, used for the propagation of the resource constraints for the tasks, has been vastly improved, notably for the alternative resources. As a result, the performance of Artelys Kalis has vastly improved. For example, in the case of a scheduling problem with up to 250 alternative resources as a function of the number of tasks planned, the computation time reduces as shown below:
Other new features of Artelys Kalis 12.8:
Support of Python 3 Cross-platform random numbers generation
For more information, do not hesitate to contact us.


First Successful Auction for the New French Capacity Mechanism!
— The first auction of the new French Capacity Mechanism was successfully held on Monday, 6 July 2026. Artelys is proud to provide the market clearing algorithm used to select the accepted capacity offers.

Artelys compared the compensation mechanisms available for hydropower across global electricity markets in collaboration with CEATI
— Artelys is proud to have issued a new report published by CEATI, providing a comprehensive benchmark of compensation mechanisms available to hydropower assets across electricity markets in North America, Europe, and beyond.
Artelys Crystal HPC: Our integrated, sovereign High-Performance Computing (HPC) managed platform for industries
— Organizations that run complex simulations, large-scale optimizations, or sensitive calculations face a threefold challenge: securing the computing power to match their ambitions, ensuring data sovereignty, and avoiding weeks of setup time before seeing initial results.

Artelys Expands to Switzerland with the Launch of Artelys Switzerland
— Artelys is pleased to announce the establishment of Artelys Switzerland, a new subsidiary based in Sion. This strategic expansion marks a significant step in the company’s continued international growth and reflects its commitment to better serving clients across the Swiss market and the broader DACH region.
subscribe to our newsletters
© ARTELYS • All rights reserved • Legal mentions
Artelys Kalis 12.8: Résolvez des problèmes de job shop toujours plus grands !
Principales nouveautés
Cette nouvelle version permet de résoudre plus facilement les problèmes de job-shop (JSP). Artelys Kalis améliore la modélisation et la résolution de problèmes d’optimisation en informatique et en recherche opérationnelle pour lesquels des tâches doivent être planifiées et affectées à des ressources.
Du point de vue de la modélisation, il est désormais possible pour l’utilisateur de définir un set-up time entre deux tâches nécessitant la même ressource. Par exemple, il devient facile de modéliser un problème de planification de tâches de maintenance localisées à des lieux différents, et pour lesquelles les techniciens compétents pour les accomplir doivent se déplacer entre elles.
Du point de vue de la résolution, l’algorithme Timetable (algorithme utilisé pour la propagation des contraintes entre tâches et ressources) a été largement amélioré, notamment pour les ressources alternatives. Des gains de performance importants en résultent. Pour un problème de planification avec 250 ressources alternatives en fonction du nombre de tâches planifiées, la nouvelle version d’Artelys Kalis permet de significativement réduire le temps de calcul :
De plus, Artelys Kalis 12.8 inclut maintenant les fonctionnalités suivantes :
- Support de Python 3
- Générateur cross-platform de nombres aléatoires
Pour plus d’information, n’hésitez pas à nous contacter!
First Successful Auction for the New French Capacity Mechanism!
— The first auction of the new French Capacity Mechanism was successfully held on Monday, 6 July 2026. Artelys is proud to provide the market clearing algorithm used to select the accepted capacity offers.
Artelys compared the compensation mechanisms available for hydropower across global electricity markets in collaboration with CEATI
— Artelys is proud to have issued a new report published by CEATI, providing a comprehensive benchmark of compensation mechanisms available to hydropower assets across electricity markets in North America, Europe, and beyond.
Artelys Crystal HPC: Our integrated, sovereign High-Performance Computing (HPC) managed platform for industries
— Organizations that run complex simulations, large-scale optimizations, or sensitive calculations face a threefold challenge: securing the computing power to match their ambitions, ensuring data sovereignty, and avoiding weeks of setup time before seeing initial results.
Artelys Expands to Switzerland with the Launch of Artelys Switzerland
— Artelys is pleased to announce the establishment of Artelys Switzerland, a new subsidiary based in Sion. This strategic expansion marks a significant step in the company’s continued international growth and reflects its commitment to better serving clients across the Swiss market and the broader DACH region.