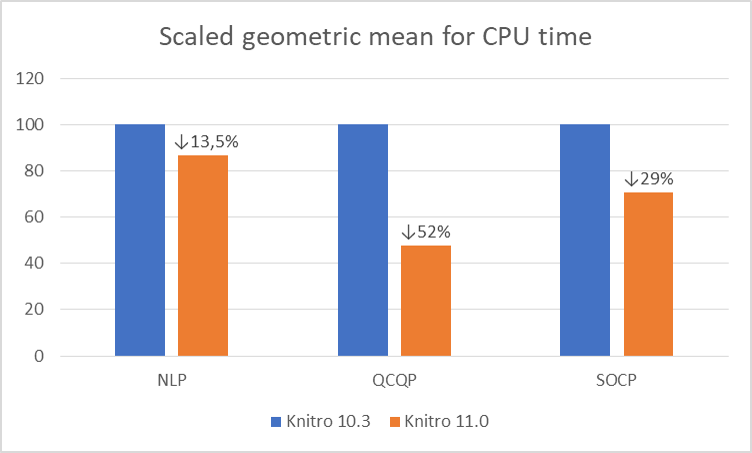
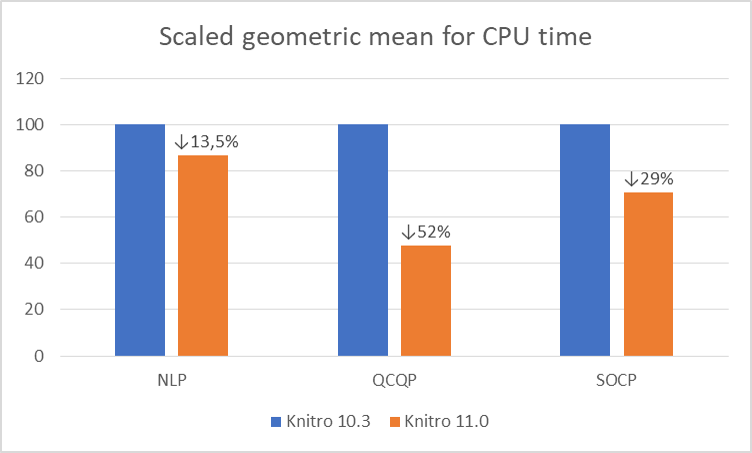
Artelys Knitro 11: New SOCP algorithm!
This version comes with a redesign of the C API improving flexibility when manipulating your models. The user can directly provide the constraint structure (e.g. linear, quadratic, quadratic conic) to the solver without using callback functions. It is also possible to provide derivatives for only a subset of the model, Knitro being able to automatically approximate the missing derivatives.
Artelys Knitro intègre désormais une spécialisation algorithmique permettant de gérer efficacement les contraintes quadratiques coniques, présentes dans les modèles SOCP que l’on retrouve dans de nombreuses applications (l’économie, la physique, la finance …). Cette évolution majeure pour les problèmes SOCP s’accompagne d’une amélioration notable des performances sur les problèmes QCQP.
Other features
• CG preconditioning now available for all classes of problems
• New parallel linear solvers (HSL MA86 and MA97) allowing speedups on large scale problems
• The Knitro R interface is now open source
• Several enhancements of the MINLP and active-set algorithms
• General performance improvements in particular for convex problems


First Successful Auction for the New French Capacity Mechanism!
— The first auction of the new French Capacity Mechanism was successfully held on Monday, 6 July 2026. Artelys is proud to provide the market clearing algorithm used to select the accepted capacity offers.

Artelys compared the compensation mechanisms available for hydropower across global electricity markets in collaboration with CEATI
— Artelys is proud to have issued a new report published by CEATI, providing a comprehensive benchmark of compensation mechanisms available to hydropower assets across electricity markets in North America, Europe, and beyond.
Artelys Crystal HPC: Our integrated, sovereign High-Performance Computing (HPC) managed platform for industries
— Organizations that run complex simulations, large-scale optimizations, or sensitive calculations face a threefold challenge: securing the computing power to match their ambitions, ensuring data sovereignty, and avoiding weeks of setup time before seeing initial results.

Artelys Expands to Switzerland with the Launch of Artelys Switzerland
— Artelys is pleased to announce the establishment of Artelys Switzerland, a new subsidiary based in Sion. This strategic expansion marks a significant step in the company’s continued international growth and reflects its commitment to better serving clients across the Swiss market and the broader DACH region.
subscribe to our newsletters
© ARTELYS • All rights reserved • Legal mentions